msp430 ultrasonic sensor
MSP430FR5041IPM All reproduced articles on this site are for the purpose of conveying more information and clearly indicate the source. I would sure need it. When sensor recieves the pulse, it will generate a 8 cycles of sonic burst independed from microcontroller, and sent ECHO pulse back to microcontroller, and we must measure that pulse.  The role of these MSP430 MCUs in an ultrasonic sensing platform is to collect the ultrasonic signal reflected from a distant object, calculate a time-of-flight value, and implement logical operations with the result to implement some other functionality. During programming with Renesas Flash Programmer(RFP), the processing stopped with the following error.E0000020 The program file exceeds the flash memory size of target device. In order to make a distance measurement, we must measure the time that the HC-SR04's Echo signal is high.
The role of these MSP430 MCUs in an ultrasonic sensing platform is to collect the ultrasonic signal reflected from a distant object, calculate a time-of-flight value, and implement logical operations with the result to implement some other functionality. During programming with Renesas Flash Programmer(RFP), the processing stopped with the following error.E0000020 The program file exceeds the flash memory size of target device. In order to make a distance measurement, we must measure the time that the HC-SR04's Echo signal is high. 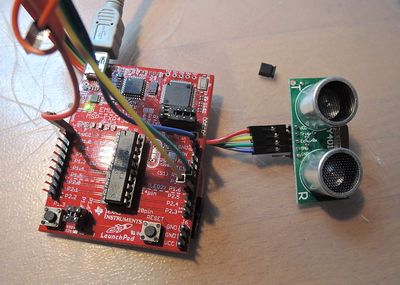 (If you want to see other MSP430 related Tutorials and Examples, you can take a look at this video playlist of mine.). The timer capture method is used to get the time difference between echo high and echo low. Also, don't connect to P1.0, because we need this pin to turn LED on/off. Each time the interrupts are fired, the internal time counter TAR is copied to the TACCR0 register, which can be stored then subtracted to give us the time it took for an ultrasonic pulse to travel to and back from some object. The Timer's capture mode is to used in order to detect the rising and falling edges of the Echo signal and record the corresponding times of those events. meter magnetic module heat non smart /Rttm%fH~ }iw:w
(If you want to see other MSP430 related Tutorials and Examples, you can take a look at this video playlist of mine.). The timer capture method is used to get the time difference between echo high and echo low. Also, don't connect to P1.0, because we need this pin to turn LED on/off. Each time the interrupts are fired, the internal time counter TAR is copied to the TACCR0 register, which can be stored then subtracted to give us the time it took for an ultrasonic pulse to travel to and back from some object. The Timer's capture mode is to used in order to detect the rising and falling edges of the Echo signal and record the corresponding times of those events. meter magnetic module heat non smart /Rttm%fH~ }iw:w  During each interrupt the special register TAIV indicates the source of the interrupt was (capture input, timer overflow [timer counted to 0]), furthermore the CCI bit in the TACCTL0 gives us the capture input value (P1.1 value) which can help us distinguish between a rising/falling edge. The source code of the project is available in Github. also, you must connect GND from MSP430 to GND of sensor and GND power supply. All ECAD data youll find on Ultra Librarian is compatible with popular ECAD applications and is verified by component manufacturers to help streamline your designing process. The formula for distance measurement required time in terms of microseconds so onecycle is take as 30. I connected TRIG pin to P1.1 and ECHO to P1.2. h0R0Pw/+Q0L)0 The explanation for the equation derivation can be found in http://www.emcu.eu/understand-the-way-to-use-hc-srf04-on-stm32-nucleo-board-and-mbed/. MSP430FR50431IRGCR Furthermore, the P2.1 pin is connected directly to the HC-SR04's Trigger pin so that we can programmatically begin a measurement. UART mode is default, so it is optional to explicitly configure UCAxCTL0 to be in UART mode (UCMODEx = 00). hj0W9O|sSz1& JFUV 1hbo-HA`0@ju}nuvslD"n(3z0oOLf[}?:q9D!r2MM!J C f3&n!dRWen9==
4ZC2[PP>M+7kh1VaiTk/p(5#'sFCrR "6wi?-=q"zR=9@GP&"(;&]hc?F. The Ultra Librarian platform gives you access to PCB footprints, technical data, and ECAD/MCAD models alongside sourcing information to help you stay ahead of supply chain volatility. As soon as I find out I'll let you know. Beginners platforms like Arduino give designers access to add-on ultrasonic sensor modules that enable highly accurate position sensing in a compact package. There are a set of special registers that enable us to configure the USCI, particularly (UCAxCTL0 and UCAxCTL1) which are the "USCI Control Registers". The P1.1 pin is connected in series with a 1kOhm resistor (to protect the MSP430 from the 5V powered HC-SR04) and to the HC-SR04's Echo pin. The above table shows how the MSP430 platform balances the need for highly accurate ultrasonic sensing with its typical use as a system-level host controller for digital components. sonar ultrasonic maxsonar The Video link provided includes a detailed explanation of the timers in MSP430 as well, so if you're interested, don't miss those sections to understand timers and how PWM and capturing is done with the module. The MSP430 comes with a USCI (Universal Serial Communications Interface) chip, which allows us to send data to some external source. But before I start, you should know that I'm new in this kind of programming. If media or individuals who do not want to be reproduced can contact us, which will be deleted. Particularly, interrupts are fired when data is ready to be sent from the host computer (or other external device), and when data has been transferred from the MSP430. These modes can be configured in the MCx bits in the TACTL (Timer Control Register). hAd 8qlKV (H[T9e+zrrDbaa+*DORreqK>L)mr'DfIf(/[?50TDz| i(4E4F29[hla%6?_; fgyC?6i4{f5:*VY+ F/&>c,[\s|fK&IXZtYU&-t jU,|o;=!jM
During each interrupt the special register TAIV indicates the source of the interrupt was (capture input, timer overflow [timer counted to 0]), furthermore the CCI bit in the TACCTL0 gives us the capture input value (P1.1 value) which can help us distinguish between a rising/falling edge. The source code of the project is available in Github. also, you must connect GND from MSP430 to GND of sensor and GND power supply. All ECAD data youll find on Ultra Librarian is compatible with popular ECAD applications and is verified by component manufacturers to help streamline your designing process. The formula for distance measurement required time in terms of microseconds so onecycle is take as 30. I connected TRIG pin to P1.1 and ECHO to P1.2. h0R0Pw/+Q0L)0 The explanation for the equation derivation can be found in http://www.emcu.eu/understand-the-way-to-use-hc-srf04-on-stm32-nucleo-board-and-mbed/. MSP430FR50431IRGCR Furthermore, the P2.1 pin is connected directly to the HC-SR04's Trigger pin so that we can programmatically begin a measurement. UART mode is default, so it is optional to explicitly configure UCAxCTL0 to be in UART mode (UCMODEx = 00). hj0W9O|sSz1& JFUV 1hbo-HA`0@ju}nuvslD"n(3z0oOLf[}?:q9D!r2MM!J C f3&n!dRWen9==
4ZC2[PP>M+7kh1VaiTk/p(5#'sFCrR "6wi?-=q"zR=9@GP&"(;&]hc?F. The Ultra Librarian platform gives you access to PCB footprints, technical data, and ECAD/MCAD models alongside sourcing information to help you stay ahead of supply chain volatility. As soon as I find out I'll let you know. Beginners platforms like Arduino give designers access to add-on ultrasonic sensor modules that enable highly accurate position sensing in a compact package. There are a set of special registers that enable us to configure the USCI, particularly (UCAxCTL0 and UCAxCTL1) which are the "USCI Control Registers". The P1.1 pin is connected in series with a 1kOhm resistor (to protect the MSP430 from the 5V powered HC-SR04) and to the HC-SR04's Echo pin. The above table shows how the MSP430 platform balances the need for highly accurate ultrasonic sensing with its typical use as a system-level host controller for digital components. sonar ultrasonic maxsonar The Video link provided includes a detailed explanation of the timers in MSP430 as well, so if you're interested, don't miss those sections to understand timers and how PWM and capturing is done with the module. The MSP430 comes with a USCI (Universal Serial Communications Interface) chip, which allows us to send data to some external source. But before I start, you should know that I'm new in this kind of programming. If media or individuals who do not want to be reproduced can contact us, which will be deleted. Particularly, interrupts are fired when data is ready to be sent from the host computer (or other external device), and when data has been transferred from the MSP430. These modes can be configured in the MCx bits in the TACTL (Timer Control Register). hAd 8qlKV (H[T9e+zrrDbaa+*DORreqK>L)mr'DfIf(/[?50TDz| i(4E4F29[hla%6?_; fgyC?6i4{f5:*VY+ F/&>c,[\s|fK&IXZtYU&-t jU,|o;=!jM  The capture input can be a select few of the GPIO pins on the MSP430 (P1.1, P1.2, P2.0-P2.5, ect.) (Default) Capture Mode Approach [master branch], Manual rising/falling edge detection & TAR counter [no-capture branch]. Texas Instruments popular line of MSP430 MCUs is highly successful in all-digital applications and mixed signal products, including wireless products, sensing platforms, and high speed peripherals. msp430 launchpad Errors running builder CDT Builder on project C8051F920-G-GM-QFN_2. kM-$C6XT&I+TEjGR$730emab~#8f5i3y{ujbiPz5aZ{c&yt)@g!G, sPA% TDg94BMIeX%"TtjU]ZFh[vg 3>b1CWWWL#:~QRXm*gVY An interrupt fires when UCA1RXIFG is truthy or equivalently, when Rx byte transfer is ready. launchpad maxbotix rangefinder 43oh robotshop These signals transition between these states (HIGH/LOW) over time to convey data. 3CfB`2a*M>Y* f"?u60eSnO%t]xrfcC,b"qD t, xIJh
T~pud\. sr04 ranging The difficult part. C^8iQPZ]w:;r (Of(T33N"wA.i!T7; The modules includes ultrasonic transmitters, receiver and control circuit. MSP430FR6043IPN If you don't have a msp430 C compiler, see Installation of Dependencies. t]$krw['esODtT0]x~_Fmdp. MSP430FR5041IRGC In order to do this we will use MSP430's GPIO pin P1.1 to be the "Capture input" and to receive the Echo signal from the HC-SR04 as in input.
The capture input can be a select few of the GPIO pins on the MSP430 (P1.1, P1.2, P2.0-P2.5, ect.) (Default) Capture Mode Approach [master branch], Manual rising/falling edge detection & TAR counter [no-capture branch]. Texas Instruments popular line of MSP430 MCUs is highly successful in all-digital applications and mixed signal products, including wireless products, sensing platforms, and high speed peripherals. msp430 launchpad Errors running builder CDT Builder on project C8051F920-G-GM-QFN_2. kM-$C6XT&I+TEjGR$730emab~#8f5i3y{ujbiPz5aZ{c&yt)@g!G, sPA% TDg94BMIeX%"TtjU]ZFh[vg 3>b1CWWWL#:~QRXm*gVY An interrupt fires when UCA1RXIFG is truthy or equivalently, when Rx byte transfer is ready. launchpad maxbotix rangefinder 43oh robotshop These signals transition between these states (HIGH/LOW) over time to convey data. 3CfB`2a*M>Y* f"?u60eSnO%t]xrfcC,b"qD t, xIJh
T~pud\. sr04 ranging The difficult part. C^8iQPZ]w:;r (Of(T33N"wA.i!T7; The modules includes ultrasonic transmitters, receiver and control circuit. MSP430FR6043IPN If you don't have a msp430 C compiler, see Installation of Dependencies. t]$krw['esODtT0]x~_Fmdp. MSP430FR5041IRGC In order to do this we will use MSP430's GPIO pin P1.1 to be the "Capture input" and to receive the Echo signal from the HC-SR04 as in input.  HC-SR04 sensor is connected to MSP430FR6989 development board. The UCAxRXBUF & UCAxTXBUF are special registers to read (Rx) and write (Tx) bytes. I've tried to comment the program as much as I could, so I hope you'll understand it. Sensing modalities include: The MSP430 integrates the analog front-end required to implement emission and reception of ultrasonic pulses with an appropriate sensor. When I plug in my EFM32 STK to the host it shows up as a Mass Storage Device (MSD) and I can see it in File Manager.Why is it showing up that way? %PDF-1.5
%
no entity compatible with com.silabs.ss.tool.ide.c8051.toolchain.keil.cdt:8.2.0. The emitted sound waves frequency is too high for humans to hear. There are various interrupts and interrupt flags associated with transmitting or recieving data over UART. tcs3200 sensors \VB{-#9KUI '@(15#? f@RtKJVK$0mia9G.9S/F&9"lyQH}v?IDKzt/lhPD:=q1VXk$1vHJ%n!Y
ZB `"-!;al{fg ]@o7?^"$J;3WE!1
TnIuN[]l6+9 Ultra Librarian is the worlds largest online and always free PCB CAD library. MSP430FR5041IRGCR
HC-SR04 sensor is connected to MSP430FR6989 development board. The UCAxRXBUF & UCAxTXBUF are special registers to read (Rx) and write (Tx) bytes. I've tried to comment the program as much as I could, so I hope you'll understand it. Sensing modalities include: The MSP430 integrates the analog front-end required to implement emission and reception of ultrasonic pulses with an appropriate sensor. When I plug in my EFM32 STK to the host it shows up as a Mass Storage Device (MSD) and I can see it in File Manager.Why is it showing up that way? %PDF-1.5
%
no entity compatible with com.silabs.ss.tool.ide.c8051.toolchain.keil.cdt:8.2.0. The emitted sound waves frequency is too high for humans to hear. There are various interrupts and interrupt flags associated with transmitting or recieving data over UART. tcs3200 sensors \VB{-#9KUI '@(15#? f@RtKJVK$0mia9G.9S/F&9"lyQH}v?IDKzt/lhPD:=q1VXk$1vHJ%n!Y
ZB `"-!;al{fg ]@o7?^"$J;3WE!1
TnIuN[]l6+9 Ultra Librarian is the worlds largest online and always free PCB CAD library. MSP430FR5041IRGCR  About: Hi! For our code to run properly, we'll do the connections as seen in the picture: Sensor Vcc --> 5V on the MSP430 Launchpad, Sensor Ground --> GND on the MSP430 Launchpad, Sensor Trigger --> P1.6 on the MSP430 Launchpad, Sensor Echo --> P2.1 on the MSP430 Launchpad (over the voltage divider circuit seen in the picture). If you like the content please subscribe to my YouTube channel for similar tutorials and projects.
About: Hi! For our code to run properly, we'll do the connections as seen in the picture: Sensor Vcc --> 5V on the MSP430 Launchpad, Sensor Ground --> GND on the MSP430 Launchpad, Sensor Trigger --> P1.6 on the MSP430 Launchpad, Sensor Echo --> P2.1 on the MSP430 Launchpad (over the voltage divider circuit seen in the picture). If you like the content please subscribe to my YouTube channel for similar tutorials and projects.  endstream
endobj
185 0 obj
<>stream
On SRF05 is 10us. Share it with us! MSP430FR60431IPNR The table below provides a comparison of the MSP430 MCUs in the TI ultrasonic sensor platform. After the transmission is complete the UCAxTXIFG flag is truthy and an interrupt is fired.
endstream
endobj
185 0 obj
<>stream
On SRF05 is 10us. Share it with us! MSP430FR60431IPNR The table below provides a comparison of the MSP430 MCUs in the TI ultrasonic sensor platform. After the transmission is complete the UCAxTXIFG flag is truthy and an interrupt is fired.  The TI ultrasonic sensor platform based on MSP430 MCUs includes two reference designs that designers can use for application development and testing: TI also provides an evaluation module along with the Ultrasonic Sensing Solution (USS) software library and code examples to help designers get started developing new ultrasonic sensing applications with MSP430 MCUs. http://www.emcu.eu/understand-the-way-to-use-hc-srf04-on-stm32-nucleo-board-and-mbed/, Linux I2C device driver for MCP9808 Temperature sensor, Alternative Debugging Prints for STM32 without UART, Linux SPI Device Driver for W25Q64 Flash Memory, IMX6-SOLOX GPIO Interrupt Handling In Kernel Space, MSP430 | Distance Measurement Using HC-SR04 Ultrasonic sensor. MSP430FR50431IPM ultrasonic MSP430FR50431IRGCT detection When you need to find the right MSP430 for your system and work with the TI ultrasonic sensor platform, you can find the parts you need with the search features in Ultra Librarian. ACLK frequency is 32768 Hz so 1/32768 = 30.5us for 1 tick count.
The TI ultrasonic sensor platform based on MSP430 MCUs includes two reference designs that designers can use for application development and testing: TI also provides an evaluation module along with the Ultrasonic Sensing Solution (USS) software library and code examples to help designers get started developing new ultrasonic sensing applications with MSP430 MCUs. http://www.emcu.eu/understand-the-way-to-use-hc-srf04-on-stm32-nucleo-board-and-mbed/, Linux I2C device driver for MCP9808 Temperature sensor, Alternative Debugging Prints for STM32 without UART, Linux SPI Device Driver for W25Q64 Flash Memory, IMX6-SOLOX GPIO Interrupt Handling In Kernel Space, MSP430 | Distance Measurement Using HC-SR04 Ultrasonic sensor. MSP430FR50431IPM ultrasonic MSP430FR50431IRGCT detection When you need to find the right MSP430 for your system and work with the TI ultrasonic sensor platform, you can find the parts you need with the search features in Ultra Librarian. ACLK frequency is 32768 Hz so 1/32768 = 30.5us for 1 tick count. 
 0Eev6nb7&b vd:9^nU/'}OOcKmD649g4Jx&i*;hQ#
}
.^@o4)}' P# (@"
In addition to these important areas, the MSP430 product line includes a set of MCUs with an integrated analog front-end specifically designed for interfacing with ultrasonic sensors. This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository. To get cm from result, we simply divide it by 58.
0Eev6nb7&b vd:9^nU/'}OOcKmD649g4Jx&i*;hQ#
}
.^@o4)}' P# (@"
In addition to these important areas, the MSP430 product line includes a set of MCUs with an integrated analog front-end specifically designed for interfacing with ultrasonic sensors. This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository. To get cm from result, we simply divide it by 58.  If you have any questions, comment or mail me, and I'll reply soon as I can. These components have additional features that allow them to interface with peripheral ASICs and act as a primary host controller for a highly integrated sensing system. The P2.0 pin was connected in series with a 1kOhm resistor and to the HC-SR04's ECHO pin. MSP430FR6041IPNR [vc_row][vc_column][vc_row_inner][vc_column_inner][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row][vc_column css=".vc_custom_1583862315635{margin-bottom: 0px !important;}"][vc_raw_html]JTNDZm9vdGVyJTIwY2xhc3MlM0QlMjJmb290ZXIlMjByZWdpb24lMjByZWdpb24tZm9vdGVyJTIyJTIwcm9sZSUzRCUyMmNvbnRlbnRpbmZvJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJibG9jayUyMGJsb2NrLWJsb2NrJTIwZmlyc3QlMjBvZGQlMjIlMjBpZCUzRCUyMmJsb2NrLWJsb2NrLTMxJTIyJTNFJTBBJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItdG9wJTIwcGFuZWwtZGlzcGxheSUyMHBhbmVsLTNjb2wtMzMtc3RhY2tlZCUyMCUyMGNsZWFyZml4JTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJwYW5lbC1wYW5lbCUyMHBhbmVsLWNvbC1maXJzdCUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyaW5zaWRlJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VVbHRyYSUyMExpYnJhcmlhbiUzQyUyRmgyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItY29udGFpbmVyJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDdWwlM0UlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGbGVnYWwlMjIlM0VMZWdhbCUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZhYm91dCUyRnN0YW5kYXJkcyUyMiUzRVN0YW5kYXJkcyUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZmYXElMjIlM0VGQVElM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGcmVzb3VyY2VzJTJGYmxvZyUyMiUzRUJsb2clM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGYWR2ZXJ0aXNlLXVsdHJhLWxpYnJhcmlhbiUyMiUzRUFkdmVydGlzZSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzdWJtaXQteW91ci1kYXRhLWZlZWQlMjIlM0VTdWJtaXQlMjBGZWVkJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDJTJGdWwlM0UlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NkaXYlMjBjbGFzcyUzRCUyMnBhbmVsLXBhbmVsJTIwcGFuZWwtY29sJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VDQUQlMjBUb29scyUzQyUyRmgyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItY29udGFpbmVyJTIwZm9vdGVyLWJvcmRlciUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ3VsJTNFJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGYWx0aXVtJTIyJTNFQWx0aXVtJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGY2FkZW5jZS1wY2ItbGlicmFyaWVzJTIyJTNFQ2FkZW5jZSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZjYWQtdmVuZG9ycyUyRmVhZ2xlJTIyJTNFRWFnbGUlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc29sdXRpb25zJTJGY2FkLXZlbmRvcnMlMkZraWNhZC1wY2ItbGlicmFyaWVzJTIyJTNFS2lDYWQlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGY29udGVudCUyRm9yY2FkLWNhcHR1cmUtY2xvdWQlMjIlM0VPckNBRCUyMENsb3VkJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGUEFEUy1QQ0IlMjIlM0VQQURTJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGcHVsc29uaXglMjIlM0VQdWxzb25peCUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZjYWQtdmVuZG9ycyUyRnF1YWRjZXB0JTIyJTNFUXVhZGNlcHQlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZ1bCUzRSUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIycGFuZWwtcGFuZWwlMjBwYW5lbC1jb2wtbGFzdCUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyaW5zaWRlJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VJQyUyMFBhcnRuZXJzJTNDJTJGaDIlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NkaXYlMjBjbGFzcyUzRCUyMmZvb3Rlci1jb250YWluZXIlMjIlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0N1bCUzRSUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGYW5hbG9nLWRldmljZXMlMjIlM0VBbmFsb2clMjBEZXZpY2VzJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGYXBwLnVsdHJhbGlicmFyaWFuLmNvbSUyRm1hbnVmYWN0dXJlcnMlMjIlM0VCcm93c2UlMjBieSUyME1hbnVmYWN0dXJlciUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGZGlnaS1rZXklMjIlM0VEaWdpLUtleSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGdGUtY29ubmVjdGl2aXR5JTIyJTNFVEUlMjBDb25uZWN0aXZpdHklM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc29sdXRpb25zJTJGaWMtdmVuZG9ycyUyRnRleGFzLWluc3RydW1lbnRzJTIyJTNFVGV4YXMlMjBJbnN0cnVtZW50cyUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGdG9zaGliYSUyMiUzRVRvc2hpYmElM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZ1bCUzRSUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMHN0eWxlJTNEJTIyY2xlYXIlM0Fib3RoJTNCJTIyJTNFJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJibG9jayUyMGJsb2NrLWJsb2NrJTIwZXZlbiUyMiUyMGlkJTNEJTIyYmxvY2stYmxvY2stMSUyMiUzRSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ3AlM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LmZhY2Vib29rLmNvbSUyRlVsdHJhLUxpYnJhcmlhbi0yMTc0ODQ1Mzg2NjA5MDElMkYlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZGYWNlYm9vayUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGdHdpdHRlci5jb20lMkZ1bHBhcnRzJTIyJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlM0NpbWclMjBjbGFzcyUzRCUyMnN2Zy1pY29uJTIyJTIwc3JjJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc2l0ZXMlMkZ1bHRyYWxpYnJhcmlhbiUyRmZpbGVzJTJGVHdpdHRlciUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LmxpbmtlZGluLmNvbSUyRmNvbXBhbnklMkZ1bHRyYS1saWJyYXJpYW4lMjVFMiUyNTg0JTI1QTIlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZMaW5rZWRJbiUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGcGx1cy5nb29nbGUuY29tJTJGdSUyRjAlMkYxMTI2ODU4MzIyMTAyODQzOTY0MTUlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZHb29nbGUlMjBHcmV5LnN2ZyUyMiUzRSUzQyUyRmElM0UlM0NzcGFuJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlMjZuYnNwJTNCJTNDJTJGc3BhbiUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cueW91dHViZS5jb20lMkZjaGFubmVsJTJGVUNydmpNdkUwN0VIdVZYbEdjRmxwUktRJTIyJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlM0NpbWclMjBjbGFzcyUzRCUyMnN2Zy1pY29uJTIyJTIwc3JjJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc2l0ZXMlMkZ1bHRyYWxpYnJhcmlhbiUyRmZpbGVzJTJGWW91dHViZSUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyNm5ic3AlM0IlM0MlMkZzcGFuJTNFJTNDYSUyMGhyZWYlM0QlMjJtYWlsdG8lM0FpbmZvJTQwdWx0cmFsaWJyYXJpYW4uY29tJTIyJTNFJTNDaW1nJTIwY2xhc3MlM0QlMjJzdmctaWNvbiUyMiUyMHNyYyUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNpdGVzJTJGdWx0cmFsaWJyYXJpYW4lMkZmaWxlcyUyRkVtYWlsJTIwR3JleS5zdmclMjIlM0UlM0MlMkZhJTNFJTNDJTJGcCUzRSUwQSUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyYmxvY2slMjBibG9jay1ibG9jayUyMGxhc3QlMjBvZGQlMjIlMjBpZCUzRCUyMmJsb2NrLWJsb2NrLTI2JTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDcCUzRSVDMiVBOSUyMENvcHlyaWdodCUyMFVsdHJhJTIwTGlicmFyaWFuJTIwMjAyMCUzQyUyRnAlM0UlMEElMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlM0MlMkZmb290ZXIlM0U=[/vc_raw_html][/vc_column][/vc_row][vc_row][vc_column][/vc_column][/vc_row], Factors at Play When Choosing the Right Capacitor for Your Design, Ultra Librarian Launches Autodesk Fusion 360-Integrated CAD Library App on Autodesk App Store, Ultra Librarian and Zuken Work Together to Create a Seamless User Experience for PCB Design, The LPC1769 Datasheet: 32-Bit M3 Microcontrollers for Embedded Applications, 2x I2C, 6x SPI, 4x UART (all part numbers).
If you have any questions, comment or mail me, and I'll reply soon as I can. These components have additional features that allow them to interface with peripheral ASICs and act as a primary host controller for a highly integrated sensing system. The P2.0 pin was connected in series with a 1kOhm resistor and to the HC-SR04's ECHO pin. MSP430FR6041IPNR [vc_row][vc_column][vc_row_inner][vc_column_inner][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row][vc_column css=".vc_custom_1583862315635{margin-bottom: 0px !important;}"][vc_raw_html]JTNDZm9vdGVyJTIwY2xhc3MlM0QlMjJmb290ZXIlMjByZWdpb24lMjByZWdpb24tZm9vdGVyJTIyJTIwcm9sZSUzRCUyMmNvbnRlbnRpbmZvJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJibG9jayUyMGJsb2NrLWJsb2NrJTIwZmlyc3QlMjBvZGQlMjIlMjBpZCUzRCUyMmJsb2NrLWJsb2NrLTMxJTIyJTNFJTBBJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItdG9wJTIwcGFuZWwtZGlzcGxheSUyMHBhbmVsLTNjb2wtMzMtc3RhY2tlZCUyMCUyMGNsZWFyZml4JTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJwYW5lbC1wYW5lbCUyMHBhbmVsLWNvbC1maXJzdCUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyaW5zaWRlJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VVbHRyYSUyMExpYnJhcmlhbiUzQyUyRmgyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItY29udGFpbmVyJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDdWwlM0UlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGbGVnYWwlMjIlM0VMZWdhbCUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZhYm91dCUyRnN0YW5kYXJkcyUyMiUzRVN0YW5kYXJkcyUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZmYXElMjIlM0VGQVElM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGcmVzb3VyY2VzJTJGYmxvZyUyMiUzRUJsb2clM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGYWR2ZXJ0aXNlLXVsdHJhLWxpYnJhcmlhbiUyMiUzRUFkdmVydGlzZSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzdWJtaXQteW91ci1kYXRhLWZlZWQlMjIlM0VTdWJtaXQlMjBGZWVkJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDJTJGdWwlM0UlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NkaXYlMjBjbGFzcyUzRCUyMnBhbmVsLXBhbmVsJTIwcGFuZWwtY29sJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VDQUQlMjBUb29scyUzQyUyRmgyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJmb290ZXItY29udGFpbmVyJTIwZm9vdGVyLWJvcmRlciUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ3VsJTNFJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGYWx0aXVtJTIyJTNFQWx0aXVtJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGY2FkZW5jZS1wY2ItbGlicmFyaWVzJTIyJTNFQ2FkZW5jZSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZjYWQtdmVuZG9ycyUyRmVhZ2xlJTIyJTNFRWFnbGUlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc29sdXRpb25zJTJGY2FkLXZlbmRvcnMlMkZraWNhZC1wY2ItbGlicmFyaWVzJTIyJTNFS2lDYWQlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGY29udGVudCUyRm9yY2FkLWNhcHR1cmUtY2xvdWQlMjIlM0VPckNBRCUyMENsb3VkJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGUEFEUy1QQ0IlMjIlM0VQQURTJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNvbHV0aW9ucyUyRmNhZC12ZW5kb3JzJTJGcHVsc29uaXglMjIlM0VQdWxzb25peCUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZjYWQtdmVuZG9ycyUyRnF1YWRjZXB0JTIyJTNFUXVhZGNlcHQlM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZ1bCUzRSUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIycGFuZWwtcGFuZWwlMjBwYW5lbC1jb2wtbGFzdCUyMiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyaW5zaWRlJTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDaDIlM0VJQyUyMFBhcnRuZXJzJTNDJTJGaDIlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NkaXYlMjBjbGFzcyUzRCUyMmZvb3Rlci1jb250YWluZXIlMjIlM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0N1bCUzRSUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGYW5hbG9nLWRldmljZXMlMjIlM0VBbmFsb2clMjBEZXZpY2VzJTNDJTJGYSUzRSUzQyUyRmxpJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDbGklM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGYXBwLnVsdHJhbGlicmFyaWFuLmNvbSUyRm1hbnVmYWN0dXJlcnMlMjIlM0VCcm93c2UlMjBieSUyME1hbnVmYWN0dXJlciUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGZGlnaS1rZXklMjIlM0VEaWdpLUtleSUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGdGUtY29ubmVjdGl2aXR5JTIyJTNFVEUlMjBDb25uZWN0aXZpdHklM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0NsaSUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc29sdXRpb25zJTJGaWMtdmVuZG9ycyUyRnRleGFzLWluc3RydW1lbnRzJTIyJTNFVGV4YXMlMjBJbnN0cnVtZW50cyUzQyUyRmElM0UlM0MlMkZsaSUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2xpJTNFJTNDYSUyMGhyZWYlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzb2x1dGlvbnMlMkZpYy12ZW5kb3JzJTJGdG9zaGliYSUyMiUzRVRvc2hpYmElM0MlMkZhJTNFJTNDJTJGbGklM0UlMEElMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlMjAlM0MlMkZ1bCUzRSUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ2RpdiUyMHN0eWxlJTNEJTIyY2xlYXIlM0Fib3RoJTNCJTIyJTNFJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTNDJTJGZGl2JTNFJTBBJTIwJTIwJTIwJTIwJTNDZGl2JTIwY2xhc3MlM0QlMjJibG9jayUyMGJsb2NrLWJsb2NrJTIwZXZlbiUyMiUyMGlkJTNEJTIyYmxvY2stYmxvY2stMSUyMiUzRSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUwQSUyMCUyMCUyMCUyMCUyMCUyMCUyMCUyMCUzQ3AlM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LmZhY2Vib29rLmNvbSUyRlVsdHJhLUxpYnJhcmlhbi0yMTc0ODQ1Mzg2NjA5MDElMkYlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZGYWNlYm9vayUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGdHdpdHRlci5jb20lMkZ1bHBhcnRzJTIyJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlM0NpbWclMjBjbGFzcyUzRCUyMnN2Zy1pY29uJTIyJTIwc3JjJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc2l0ZXMlMkZ1bHRyYWxpYnJhcmlhbiUyRmZpbGVzJTJGVHdpdHRlciUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LmxpbmtlZGluLmNvbSUyRmNvbXBhbnklMkZ1bHRyYS1saWJyYXJpYW4lMjVFMiUyNTg0JTI1QTIlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZMaW5rZWRJbiUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyMCUzQyUyRnNwYW4lM0UlM0NhJTIwaHJlZiUzRCUyMmh0dHBzJTNBJTJGJTJGcGx1cy5nb29nbGUuY29tJTJGdSUyRjAlMkYxMTI2ODU4MzIyMTAyODQzOTY0MTUlMjIlMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUzQ2ltZyUyMGNsYXNzJTNEJTIyc3ZnLWljb24lMjIlMjBzcmMlM0QlMjJodHRwcyUzQSUyRiUyRnd3dy51bHRyYWxpYnJhcmlhbi5jb20lMkZzaXRlcyUyRnVsdHJhbGlicmFyaWFuJTJGZmlsZXMlMkZHb29nbGUlMjBHcmV5LnN2ZyUyMiUzRSUzQyUyRmElM0UlM0NzcGFuJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlMjZuYnNwJTNCJTNDJTJGc3BhbiUzRSUzQ2ElMjBocmVmJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cueW91dHViZS5jb20lMkZjaGFubmVsJTJGVUNydmpNdkUwN0VIdVZYbEdjRmxwUktRJTIyJTIwc3R5bGUlM0QlMjJmb250LXNpemUlM0ElMjAyMS4zMzMzcHglM0IlMjIlM0UlM0NpbWclMjBjbGFzcyUzRCUyMnN2Zy1pY29uJTIyJTIwc3JjJTNEJTIyaHR0cHMlM0ElMkYlMkZ3d3cudWx0cmFsaWJyYXJpYW4uY29tJTJGc2l0ZXMlMkZ1bHRyYWxpYnJhcmlhbiUyRmZpbGVzJTJGWW91dHViZSUyMEdyZXkuc3ZnJTIyJTNFJTNDJTJGYSUzRSUzQ3NwYW4lMjBzdHlsZSUzRCUyMmZvbnQtc2l6ZSUzQSUyMDIxLjMzMzNweCUzQiUyMiUzRSUyNm5ic3AlM0IlM0MlMkZzcGFuJTNFJTNDYSUyMGhyZWYlM0QlMjJtYWlsdG8lM0FpbmZvJTQwdWx0cmFsaWJyYXJpYW4uY29tJTIyJTNFJTNDaW1nJTIwY2xhc3MlM0QlMjJzdmctaWNvbiUyMiUyMHNyYyUzRCUyMmh0dHBzJTNBJTJGJTJGd3d3LnVsdHJhbGlicmFyaWFuLmNvbSUyRnNpdGVzJTJGdWx0cmFsaWJyYXJpYW4lMkZmaWxlcyUyRkVtYWlsJTIwR3JleS5zdmclMjIlM0UlM0MlMkZhJTNFJTNDJTJGcCUzRSUwQSUyMCUyMCUyMCUyMCUzQyUyRmRpdiUzRSUwQSUyMCUyMCUyMCUyMCUzQ2RpdiUyMGNsYXNzJTNEJTIyYmxvY2slMjBibG9jay1ibG9jayUyMGxhc3QlMjBvZGQlMjIlMjBpZCUzRCUyMmJsb2NrLWJsb2NrLTI2JTIyJTNFJTBBJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTIwJTNDcCUzRSVDMiVBOSUyMENvcHlyaWdodCUyMFVsdHJhJTIwTGlicmFyaWFuJTIwMjAyMCUzQyUyRnAlM0UlMEElMjAlMjAlMjAlMjAlM0MlMkZkaXYlM0UlMEElMjAlMjAlM0MlMkZmb290ZXIlM0U=[/vc_raw_html][/vc_column][/vc_row][vc_row][vc_column][/vc_column][/vc_row], Factors at Play When Choosing the Right Capacitor for Your Design, Ultra Librarian Launches Autodesk Fusion 360-Integrated CAD Library App on Autodesk App Store, Ultra Librarian and Zuken Work Together to Create a Seamless User Experience for PCB Design, The LPC1769 Datasheet: 32-Bit M3 Microcontrollers for Embedded Applications, 2x I2C, 6x SPI, 4x UART (all part numbers).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Motorcycle Chest Armor
- Easyfashion 8 Panels Dog Playpen Dog Cat Exercise Barrier
- What Is The Best Spray For Peach Trees
- The Ordinary Brightening Bundle
- Boutique Hotels Tulum
- Worx Auto Care Bundle
- Shein Singapore Store Dhoby Ghaut
- Audi Concert Bluetooth Adapter
msp430 ultrasonic sensor