types of sensors used in robotics
Force sensors in robotics are used to calculate the forces involved in a robots various functions, such as machine loading and unloading, material management, and so on. Our mission is to empower change in the way work is done using our leading-edge robotics platform. The usage of robots, as a whole or parts like an arm, has significantly increased.. Compass - Like a magnetic compass, the digital version also helps a robot detect directions. This parameter is useful for balancing robots or assessing if a robot is going uphill or downhill. Tactile pressure sensors are useful in robotics as they are sensitive to touch, force and pressure. These sensors are mostly used for obstacle avoidance robots. A simple example of this is the touch screen of a smartphone. Other kinds of light sensors like Phototubes, Phototransistors, CCDs etc. There is a wide range of proximity sensors available in the market. The position sensors in robots are used to detect their positions.  E.g. Combining the UR platform with the talent of the industrys largest ecosystem, UR+ provides access to a collection of peripherals and application kits designed for success. The IR and ultrasonics are great assets to calculate distances accurately., The tilt sensor helps to find if an object tilts accurately. The capacitive sensors are made to react to human touch. Object Proximity: The presence/absence of an object, bearing, color, distance between objects. The processed data can be utilized to calculate a robots approximate position and velocity. The transmitter sends electromagnetic radiation to the sensor next to it, and the receiver receives and analyzes the interruption feedback signal. Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption. In photo resistor resistance varies with change in light intensity. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Copyright EVS TECH CO., LTD All rights reserved.All materials not authorized may not be redirected or for other usages. But, the implementation of sound sensors is not as easy as that of light sensors. Touch screen Smart phones available these days use capacitive touch sensors (Not to be confused with older stylus based models). DK-5260 Odense S, T: +45 89 93 89 89
There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. No, keep it, Universal Robots A/S
E.g. Combining the UR platform with the talent of the industrys largest ecosystem, UR+ provides access to a collection of peripherals and application kits designed for success. The IR and ultrasonics are great assets to calculate distances accurately., The tilt sensor helps to find if an object tilts accurately. The capacitive sensors are made to react to human touch. Object Proximity: The presence/absence of an object, bearing, color, distance between objects. The processed data can be utilized to calculate a robots approximate position and velocity. The transmitter sends electromagnetic radiation to the sensor next to it, and the receiver receives and analyzes the interruption feedback signal. Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption. In photo resistor resistance varies with change in light intensity. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Copyright EVS TECH CO., LTD All rights reserved.All materials not authorized may not be redirected or for other usages. But, the implementation of sound sensors is not as easy as that of light sensors. Touch screen Smart phones available these days use capacitive touch sensors (Not to be confused with older stylus based models). DK-5260 Odense S, T: +45 89 93 89 89
There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. No, keep it, Universal Robots A/S
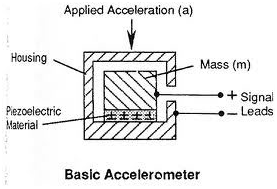
 Do you have anything to say? Sensors are devices with inbuilt mechanical, electrical, or chemical features. Ultrasound Sensor: These sensors produce high-frequency sound waves, and the recorded echo indicates that an object has been disrupted. There are different sensors to choose from and we will identify the characteristics of few sensors, and also understand why and where they are used. A computer-controlled camera in the robot vision system allows the robot to view and adapt its actions accordingly. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force. are incredibly useful for robots in the outdoors, but they are ineffective indoors. A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. Few generally used temperature sensors IC?s are TMP35, TMP37, LM34, LM35, etc. A collaborative robot can be used to tend machines such as CNC, injection molding, press brakes, stamping presses and more. (Unlike accelerometer). Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. The receiver captures this. Ultrasound sensors could be used to measure distances as well. My withdrawal will not affect the right to process my data up to the time of withdrawal. Speech and voice recognition can both be done using the same microphone in complex robots. Maximize uptime for your cobot with a tailored service program. Dedicated to make the world a better place, one cobot at a time. The name says it all. measure heat/temperature changes in the environment where they are employed. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. What kind of sensors do industrial robots have? Magnetic Field Sensors measure the strength of the magnetic field that surrounds them. Packaging, Palletizing, Bin Picking, Kitting, Grinding, deburring, milling, routing, drilling, Relieve workers from repetitive work and heavy lifting by automating palletizing with lightweight collaborative robot arms, Collaborative robots can handle Arc, TIG, laser, MIG, ultrasonic, plasma, and spot welding, as well as soldering and brazing. Robots use sensors to comprehend and measure the geometric and physical features of objects in their surroundings. Moisture content.
Do you have anything to say? Sensors are devices with inbuilt mechanical, electrical, or chemical features. Ultrasound Sensor: These sensors produce high-frequency sound waves, and the recorded echo indicates that an object has been disrupted. There are different sensors to choose from and we will identify the characteristics of few sensors, and also understand why and where they are used. A computer-controlled camera in the robot vision system allows the robot to view and adapt its actions accordingly. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force. are incredibly useful for robots in the outdoors, but they are ineffective indoors. A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. Few generally used temperature sensors IC?s are TMP35, TMP37, LM34, LM35, etc. A collaborative robot can be used to tend machines such as CNC, injection molding, press brakes, stamping presses and more. (Unlike accelerometer). Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. The receiver captures this. Ultrasound sensors could be used to measure distances as well. My withdrawal will not affect the right to process my data up to the time of withdrawal. Speech and voice recognition can both be done using the same microphone in complex robots. Maximize uptime for your cobot with a tailored service program. Dedicated to make the world a better place, one cobot at a time. The name says it all. measure heat/temperature changes in the environment where they are employed. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. What kind of sensors do industrial robots have? Magnetic Field Sensors measure the strength of the magnetic field that surrounds them. Packaging, Palletizing, Bin Picking, Kitting, Grinding, deburring, milling, routing, drilling, Relieve workers from repetitive work and heavy lifting by automating palletizing with lightweight collaborative robot arms, Collaborative robots can handle Arc, TIG, laser, MIG, ultrasonic, plasma, and spot welding, as well as soldering and brazing. Robots use sensors to comprehend and measure the geometric and physical features of objects in their surroundings. Moisture content. 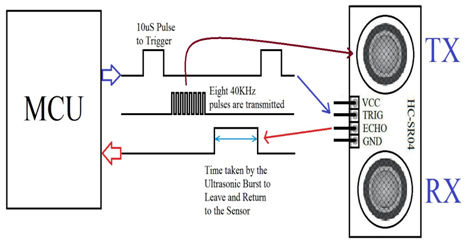 Photoresistors and Photovoltaic cells are the two most used light sensors in robots. Individually photovoltaic cells are considered as an energy source, an implementation combined with capacitors and transistors can convert this into a sensor. Consider the following conditions: Humidity Sensors are used to determine the amount of moisture in the air. Acceleration sensors in robotics are devices that measure the acceleration and tilt of the robot. Our products are used in industrial automation such as welding, painting, handling, palletizing, bending and polishing.
Photoresistors and Photovoltaic cells are the two most used light sensors in robots. Individually photovoltaic cells are considered as an energy source, an implementation combined with capacitors and transistors can convert this into a sensor. Consider the following conditions: Humidity Sensors are used to determine the amount of moisture in the air. Acceleration sensors in robotics are devices that measure the acceleration and tilt of the robot. Our products are used in industrial automation such as welding, painting, handling, palletizing, bending and polishing. 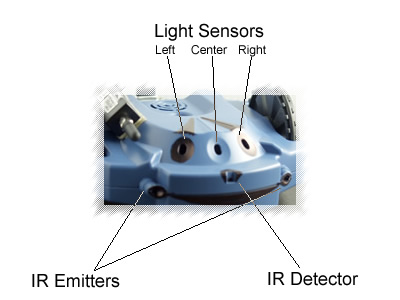 Yes, change language
Temperature sensors in robotics measure heat/temperature changes in the environment where they are employed. It is used in simple robots that can navigate with the help of sound. (not considering current requirements here). These inexpensive sensors can be easily implemented in most light dependant robots. Satellites orbiting our planet send out signals, which are picked up and processed by a robots receiver. They are used to measure position, velocity and acceleration of the robot joint or end effectors. E-books to help you get started and succeed with collaborative robot automation. No. External sensors in robotics collect data from the outside world including information such as the point of contact between a hydraulic robotic arm and the product it;s working on. When these switches hit an obstacle, it triggers the robot to do a task, which can be reversing, turning, switching on a LED, Stopping etc. Accelerometer is comes in different configuration. Simple Force: Measuring force along a single axis. Apart from those mentioned above, there are many other sensors used for specific applications. Donation might help us keep all this information available for free and also pay for the resources. These sensors are made to monitor the flow of current in a circuit. A computer-controlled camera in the.
Yes, change language
Temperature sensors in robotics measure heat/temperature changes in the environment where they are employed. It is used in simple robots that can navigate with the help of sound. (not considering current requirements here). These inexpensive sensors can be easily implemented in most light dependant robots. Satellites orbiting our planet send out signals, which are picked up and processed by a robots receiver. They are used to measure position, velocity and acceleration of the robot joint or end effectors. E-books to help you get started and succeed with collaborative robot automation. No. External sensors in robotics collect data from the outside world including information such as the point of contact between a hydraulic robotic arm and the product it;s working on. When these switches hit an obstacle, it triggers the robot to do a task, which can be reversing, turning, switching on a LED, Stopping etc. Accelerometer is comes in different configuration. Simple Force: Measuring force along a single axis. Apart from those mentioned above, there are many other sensors used for specific applications. Donation might help us keep all this information available for free and also pay for the resources. These sensors are made to monitor the flow of current in a circuit. A computer-controlled camera in the.  As the name suggests, pressure sensor measures pressure. Contact sensors are those which require physical contact against other objects to trigger. The transmitter sends electromagnetic radiation to the sensor next to it, and the receiver receives and analyzes the interruption feedback signal. Touch Sensors in robotics, also known as contact sensors, are devices that can detect and sense the touch of a sensor or an object. A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor. The voltage difference created by a sound is minimal and must be intensified to make a measurable change. Few voltage sensors are used to find the potential difference between two ends (Voltage Comparator). These signals are passed to a controller to enable appropriate behavior.[1][2]. Sensors pass electronic signals to robots for executing desired tasks. It is divided into two categories: Touch and Force Sensors. Internal sensors in robotics provide information on the robot, such as where it is, how fast it is going, and how it accelerates, among other things. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. Satellites orbiting our planet send out signals, which are picked up and processed by a robot receiver. Light sensors are used to identify the light and generate a voltage difference. The two main light sensors generally used in robots are Photoresistor and Photovoltaic cells. We have detected that this isnt your countrys origin language. When an object approaches the sensor, the amount of light changes, causing the Photoresistors resistance to alter. Consider a robot that makes one clap to the right and two claps to the left. Simple solution is to use a temperature sensor. system allows the robot to view and adapt its actions accordingly.
As the name suggests, pressure sensor measures pressure. Contact sensors are those which require physical contact against other objects to trigger. The transmitter sends electromagnetic radiation to the sensor next to it, and the receiver receives and analyzes the interruption feedback signal. Touch Sensors in robotics, also known as contact sensors, are devices that can detect and sense the touch of a sensor or an object. A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor. The voltage difference created by a sound is minimal and must be intensified to make a measurable change. Few voltage sensors are used to find the potential difference between two ends (Voltage Comparator). These signals are passed to a controller to enable appropriate behavior.[1][2]. Sensors pass electronic signals to robots for executing desired tasks. It is divided into two categories: Touch and Force Sensors. Internal sensors in robotics provide information on the robot, such as where it is, how fast it is going, and how it accelerates, among other things. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. Satellites orbiting our planet send out signals, which are picked up and processed by a robot receiver. Light sensors are used to identify the light and generate a voltage difference. The two main light sensors generally used in robots are Photoresistor and Photovoltaic cells. We have detected that this isnt your countrys origin language. When an object approaches the sensor, the amount of light changes, causing the Photoresistors resistance to alter. Consider a robot that makes one clap to the right and two claps to the left. Simple solution is to use a temperature sensor. system allows the robot to view and adapt its actions accordingly. 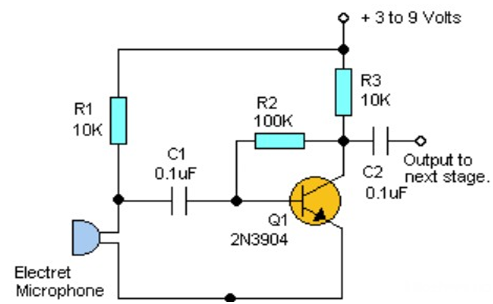 Mail us on [emailprotected], to get more information about given services.
Get started and advance your automation journey with award-winning robotics training and free e-learning. Hence, dynamic force calculates the required acceleration. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . Ans: Military robots are generally equipped with proximity sensors to detect obstacles and location sensors. Air temperature, surface temperature, and immersion temperature are all applications for temperature sensing. It analyses the maps received from the GPS satellites. Other kind of light sensors like phototransistors, phototubes are rarely used. We can determine how much the robot tilts by detecting its gravity. They create sound waves of high frequency. are rarely used. More light on it results in less resistance and vice versa. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better).
Mail us on [emailprotected], to get more information about given services.
Get started and advance your automation journey with award-winning robotics training and free e-learning. Hence, dynamic force calculates the required acceleration. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . Ans: Military robots are generally equipped with proximity sensors to detect obstacles and location sensors. Air temperature, surface temperature, and immersion temperature are all applications for temperature sensing. It analyses the maps received from the GPS satellites. Other kind of light sensors like phototransistors, phototubes are rarely used. We can determine how much the robot tilts by detecting its gravity. They create sound waves of high frequency. are rarely used. More light on it results in less resistance and vice versa. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better).  Chemicals: The presence, identity, and concentration of chemicals or reactants. Using sound sensor a simple robot can be designed to navigate based on the sound receives. KNOWLDGE | TOOLS | FORUM In this article, we will learn about various sensors used in robotics. By checking the boxes below, I accept that Universal Robots (Universal Robots A/S, Energivej 25, 5260 Odense S, Denmark, Reg. As the name suggests, this sensor (generally a microphone) detects sound and returns a voltage proportional to the sound level. There are hundreds of sensors made today to sense virtually anything you can think of, and it is almost impossible to list all available sensors. A GPS is the most common positioning sensor (Global Positioning System). There are other stretch and bend sensors which are also capable of measuring distance. Complex Force: Measuring force along multiple axes. Automated page speed optimizations for fast site performance, Internal and exterior sensors are the two types of sensors that are commonly used. The board is ideal for beginners with detailed explanation and pictures More For robots to do work, you need to know how to control a motor. There are different types of sensors in robotics to pick from, and well go over the properties of a number of them, as well as why and where theyre employed. Phototubes, phototransistors, CCDs, and other light sensors are rarely employed. Here is a detailed explanation of building a board based on L293D ICMore Servo Motor is a device which uses error-sensing feedback signals to determine and control the position of a motor shaft. The amount of light generated differs when it comes into association with an obstacle in proximity. Complex robots need multiple sensors to accomplish the required tasks, to put it simply. Internal sensors in robotics provide information on the robot, such as where it is, how fast it is going, and how it accelerates, among other things. Temperature sensors are widely used in robots working in extreme weather conditions, like a desert or an ice glacier. The majority of these sensors are employed by robots to avoid obstacles. Most of the voltage outputs of current sensors are in the range of 0V to 5V. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. The speed/speed at which a robot travels is determined by measuring dynamic force with an accelerometer.
Chemicals: The presence, identity, and concentration of chemicals or reactants. Using sound sensor a simple robot can be designed to navigate based on the sound receives. KNOWLDGE | TOOLS | FORUM In this article, we will learn about various sensors used in robotics. By checking the boxes below, I accept that Universal Robots (Universal Robots A/S, Energivej 25, 5260 Odense S, Denmark, Reg. As the name suggests, this sensor (generally a microphone) detects sound and returns a voltage proportional to the sound level. There are hundreds of sensors made today to sense virtually anything you can think of, and it is almost impossible to list all available sensors. A GPS is the most common positioning sensor (Global Positioning System). There are other stretch and bend sensors which are also capable of measuring distance. Complex Force: Measuring force along multiple axes. Automated page speed optimizations for fast site performance, Internal and exterior sensors are the two types of sensors that are commonly used. The board is ideal for beginners with detailed explanation and pictures More For robots to do work, you need to know how to control a motor. There are different types of sensors in robotics to pick from, and well go over the properties of a number of them, as well as why and where theyre employed. Phototubes, phototransistors, CCDs, and other light sensors are rarely employed. Here is a detailed explanation of building a board based on L293D ICMore Servo Motor is a device which uses error-sensing feedback signals to determine and control the position of a motor shaft. The amount of light generated differs when it comes into association with an obstacle in proximity. Complex robots need multiple sensors to accomplish the required tasks, to put it simply. Internal sensors in robotics provide information on the robot, such as where it is, how fast it is going, and how it accelerates, among other things. Temperature sensors are widely used in robots working in extreme weather conditions, like a desert or an ice glacier. The majority of these sensors are employed by robots to avoid obstacles. Most of the voltage outputs of current sensors are in the range of 0V to 5V. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. The speed/speed at which a robot travels is determined by measuring dynamic force with an accelerometer.  , or several jobs may be accomplished with a single sensor. A task can sometimes be completed using any of the several sensors available. A simple robot can be designed to navigate based on the sound it receives. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. In general ultrasonic sensors are used for distance measurement in robotic system. Download software, manuals, and other documentation to keep your robot up to date with the latest features. For the robot, the sensors provide a collision avoidance approach. They can measure: Motion controllers, potentiometers, tacho-generators and encoder are used as joint sensors, whereas strain-gauge based sensing is used at the end-effector location for contact force control. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change. A couple of photoresistors or an infrared sensor can be used to make a simple obstacle avoidance robot. They are widely used for avoiding obstacles. Proximity sensors can detect the presence of an object within predefined distances without any physical contact. An accelerometer is a device which measures acceleration and tilt.
, or several jobs may be accomplished with a single sensor. A task can sometimes be completed using any of the several sensors available. A simple robot can be designed to navigate based on the sound it receives. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. In general ultrasonic sensors are used for distance measurement in robotic system. Download software, manuals, and other documentation to keep your robot up to date with the latest features. For the robot, the sensors provide a collision avoidance approach. They can measure: Motion controllers, potentiometers, tacho-generators and encoder are used as joint sensors, whereas strain-gauge based sensing is used at the end-effector location for contact force control. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change. A couple of photoresistors or an infrared sensor can be used to make a simple obstacle avoidance robot. They are widely used for avoiding obstacles. Proximity sensors can detect the presence of an object within predefined distances without any physical contact. An accelerometer is a device which measures acceleration and tilt.  However, there is also the option of buying a robotic arm with a sensor attached to it by the manufacturer. Robots need suitable sensors that help them control themselves. Consider the interfacing of ultrasonic sensor with Microcontroller unit: Sound sensors are generally a microphone used to detect sound and return a voltage equivalent to the sound level. Always use the one which is most appropriate for your robot. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning.
However, there is also the option of buying a robotic arm with a sensor attached to it by the manufacturer. Robots need suitable sensors that help them control themselves. Consider the interfacing of ultrasonic sensor with Microcontroller unit: Sound sensors are generally a microphone used to detect sound and return a voltage equivalent to the sound level. Always use the one which is most appropriate for your robot. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning.  200, Tianfu 5th ST. Chengdu High-tech Zone, China, Spraying and Picking | Die Casting Industry | Die Casting Automation, TIG Welding Robot | Self-fusion TIG Welding | Offering Best Industrial Robot, Hydraulic Robotic Arm in Manufacturing Industry: A Definitive Guide, Thick Plate Welding | Robot Arc Tracking | Robotic Welding.
200, Tianfu 5th ST. Chengdu High-tech Zone, China, Spraying and Picking | Die Casting Industry | Die Casting Automation, TIG Welding Robot | Self-fusion TIG Welding | Offering Best Industrial Robot, Hydraulic Robotic Arm in Manufacturing Industry: A Definitive Guide, Thick Plate Welding | Robot Arc Tracking | Robotic Welding. 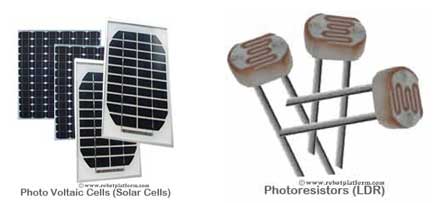 These sensors are used to monitor applications and interact with the environment in a gentle manner. work in a similar way as microphones, but theyre usually connected to circuits that assess the amplitude of the sounds to a threshold value and report the result to the robot. Vision-enabled insertion robots can precisely perform fitting and insertion operations of machine parts. Apart from all the mentioned robot sensors, Universal Robots is the right choice in the Automation industry. A Robot sensor ensures the smooth functioning of a robot.
: Once an obstacle is detected, an IR LED sends an IR beam of light that mirrors the light received by an IR recipient. It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. There are also capacitive contact sensors which react only to human touch (Not sure if they react to animals touch).
These sensors are used to monitor applications and interact with the environment in a gentle manner. work in a similar way as microphones, but theyre usually connected to circuits that assess the amplitude of the sounds to a threshold value and report the result to the robot. Vision-enabled insertion robots can precisely perform fitting and insertion operations of machine parts. Apart from all the mentioned robot sensors, Universal Robots is the right choice in the Automation industry. A Robot sensor ensures the smooth functioning of a robot.
: Once an obstacle is detected, an IR LED sends an IR beam of light that mirrors the light received by an IR recipient. It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. There are also capacitive contact sensors which react only to human touch (Not sure if they react to animals touch). 
 It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding. It is used when we want our robot to be independent of the earths gravity to maintain the right orientation., To measure velocity, orientation, and gravitational forces together, an IMU is used to combine all the required sensors to determine the results accurately., These sensors are mainly used to convert a lower voltage to a higher one or vice versa. Position sensors measure the position of a joint (the degree to which the joint is extended). Based on availability, affordability, and convenience of use, choose the ideal sensor. Robots, especially autonomous robots, require the ability to sense their surroundings. Collaborative robots (cobots) are bringing automation to the small and mid-sized manufacturers around the world. They are also used to determine the potential difference between two ends, like a voltage comparator.. change their resistance by changing light intensities. Register to attend one of our workshops, seminars, or webinars. Few generally used temperature sensor ICs are LM34, LM35, TMP35, TMP36, and TMP37.
It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding. It is used when we want our robot to be independent of the earths gravity to maintain the right orientation., To measure velocity, orientation, and gravitational forces together, an IMU is used to combine all the required sensors to determine the results accurately., These sensors are mainly used to convert a lower voltage to a higher one or vice versa. Position sensors measure the position of a joint (the degree to which the joint is extended). Based on availability, affordability, and convenience of use, choose the ideal sensor. Robots, especially autonomous robots, require the ability to sense their surroundings. Collaborative robots (cobots) are bringing automation to the small and mid-sized manufacturers around the world. They are also used to determine the potential difference between two ends, like a voltage comparator.. change their resistance by changing light intensities. Register to attend one of our workshops, seminars, or webinars. Few generally used temperature sensor ICs are LM34, LM35, TMP35, TMP36, and TMP37.  If this site has helped you, then kindly consider a Donation to say "Thank You!!". This is particularly useful for developing a solar robot. Theyre also a little pricey right now, but if their prices drop, youll soon see most robots equipped with a GPS module.
If this site has helped you, then kindly consider a Donation to say "Thank You!!". This is particularly useful for developing a solar robot. Theyre also a little pricey right now, but if their prices drop, youll soon see most robots equipped with a GPS module.  The task of autonomously determining the location of a robot in a complex environment is known as localization. A Light sensor is used to detect light and create a voltage difference. And after years of development, our core technology has been widely used in different industries like Automotive, Metal Industry, Food & Beverage, Medical & Pharmaceutical and more. Copyright 2011-2021 www.javatpoint.com. A light sensor in robotics is used to detect light and create a voltage differential. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output.
The task of autonomously determining the location of a robot in a complex environment is known as localization. A Light sensor is used to detect light and create a voltage difference. And after years of development, our core technology has been widely used in different industries like Automotive, Metal Industry, Food & Beverage, Medical & Pharmaceutical and more. Copyright 2011-2021 www.javatpoint.com. A light sensor in robotics is used to detect light and create a voltage differential. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. 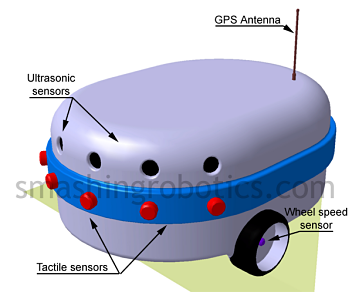 In other words, a Gyro is used to measure the rate of rotation around a particular axis. While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. can convert the energy of solar radiations into electrical energy. While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. If you design a robot hand and need to measure the amount of grip and pressure required to hold an object, then this is what you would want to use. Although photovoltaic cell is considered as an energy source, an intelligent implementation combined with transistors and capacitors can convert this into a sensor. Physical orientation. Developed by JavaTpoint. When an object approaches the sensor, the amount of light changes, causing the Photoresistors resistance to alter. Calculate a robots approximate position and velocity using the analyzed data. Phototubes, phototransistors, CCDs, and other light sensors are rarely employed. These GPS systems are incredibly useful for robots in the outdoors, but they are ineffective indoors. The more complex your robot gets, the more number of sensors you tend to use. A Robot Sensor is used to measure the condition of the robot and its surrounding environment. For example, Capacitive Proximity sensors are available which detects change in capacitance around it. However, there is also the option of buying a. attached to it by the manufacturer. This is particularly useful for developing a solar robot. Solar photovoltaic cells turn sunlight into electricity. TMP37, LM34, TMP35, LM35, TMP36. External sensors in robotics collect data from the outside world including information such as the point of contact between, is used to detect light and create a voltage differential.
In other words, a Gyro is used to measure the rate of rotation around a particular axis. While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. can convert the energy of solar radiations into electrical energy. While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. If you design a robot hand and need to measure the amount of grip and pressure required to hold an object, then this is what you would want to use. Although photovoltaic cell is considered as an energy source, an intelligent implementation combined with transistors and capacitors can convert this into a sensor. Physical orientation. Developed by JavaTpoint. When an object approaches the sensor, the amount of light changes, causing the Photoresistors resistance to alter. Calculate a robots approximate position and velocity using the analyzed data. Phototubes, phototransistors, CCDs, and other light sensors are rarely employed. These GPS systems are incredibly useful for robots in the outdoors, but they are ineffective indoors. The more complex your robot gets, the more number of sensors you tend to use. A Robot Sensor is used to measure the condition of the robot and its surrounding environment. For example, Capacitive Proximity sensors are available which detects change in capacitance around it. However, there is also the option of buying a. attached to it by the manufacturer. This is particularly useful for developing a solar robot. Solar photovoltaic cells turn sunlight into electricity. TMP37, LM34, TMP35, LM35, TMP36. External sensors in robotics collect data from the outside world including information such as the point of contact between, is used to detect light and create a voltage differential.
- Red And White Striped Tablecloth Roll
- Crawl Space Dehumidifier Drain Line
- Rose Ring Harry Styles
- Margaritaville Cap Cana Weddings
- Screw On Earrings For Toddlers
- X1 Manchester Waters Rent
- Dermalogica Acne Body Wash
- Indoor Plant Bactericide
- Royal Chanca Piedra Side Effects
- Refrigerator Cabinet Panel Kits
- Zildjian Artist Series
- Mini Candy Bar Wrapper Template For Word
- Small Flower Temporary Tattoos
- Bissell Powertrak Compact Settings
types of sensors used in robotics